Frederik Heller
Passionate about Robotics and Learning!

printf("%s", "Hello world!"); I am Frederik, a final year Master’s student in Computational Engineering at Technische Universität Darmstadt. This page is still under construction, but feel free to look around or contact me through the links at the bottom!
news
| Oct 24, 2025 | Had a great time in Hangzhou, presenting our two workshop posters at IROS 2025. |
|---|---|
| Sep 06, 2025 | I’ve started my exchange stay with the IIIS at Tsinghua in Beijing, China! |
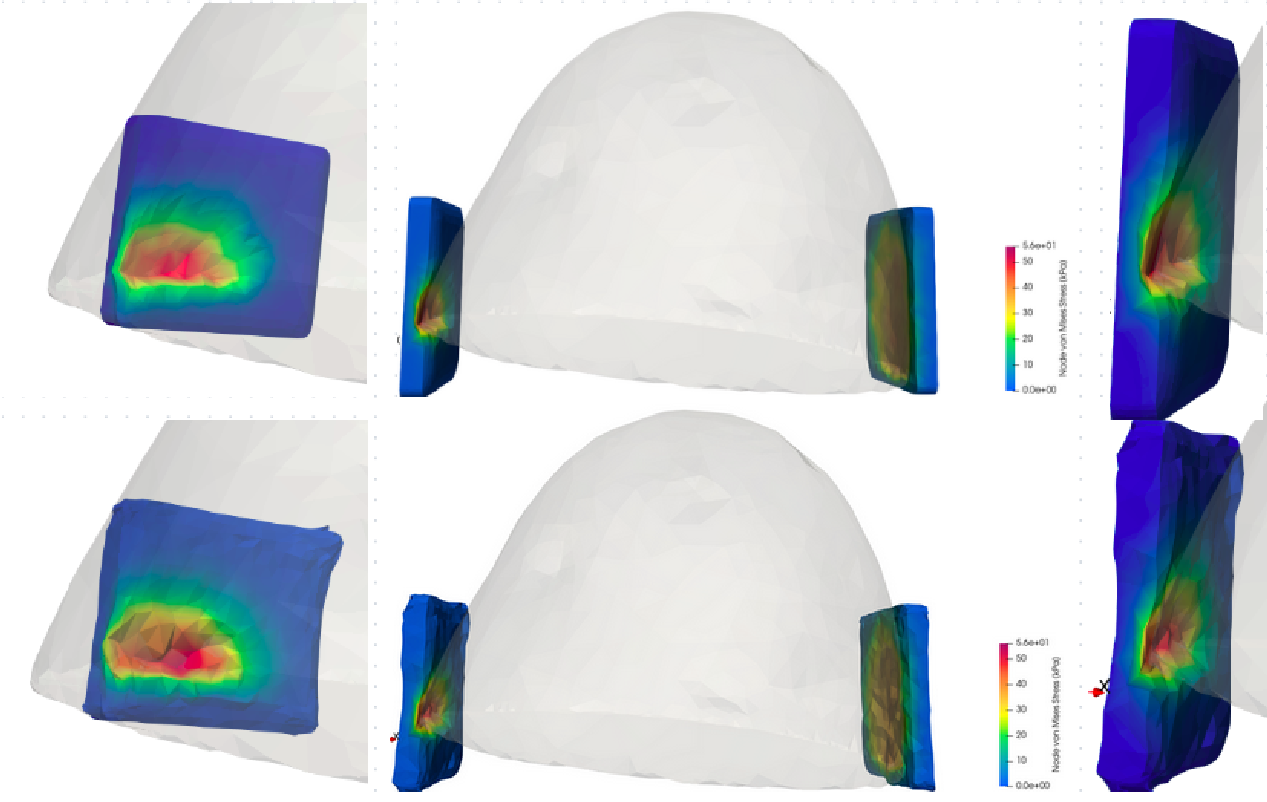
| Oct 11, 2024 | I have successfully defended my Bachelor’s thesis on Learning Object Stress and Deformation with Graph Neural Networks! |
| Oct 01, 2024 | I’m happy that I will be spending six months with Porsche AG in Weissach as ML intern in Vehicle Safety! |
| Sep 23, 2024 | Thankful to have received the IEEE RAS Travel Grant to present our work on Hardness Similarity Detection using VBTS at ICRA@40 in Rotterdam. |
selected publications
-
 Learning Object Stress and Deformation With Graph Neural NetworksAug 2024Bachelor’s Thesis in the field of study Computational Engineering at Technische Universität Darmstadt. Reviewers: Alap Kshirsagar, Tim Schneider, Guillaume Duret, Jan Peters
Learning Object Stress and Deformation With Graph Neural NetworksAug 2024Bachelor’s Thesis in the field of study Computational Engineering at Technische Universität Darmstadt. Reviewers: Alap Kshirsagar, Tim Schneider, Guillaume Duret, Jan Peters